Vectores en el espacio
Componentes de un vector en el espacio

Módulo de un vector


Distancia entre dos puntos

Vector unitario

Suma de vectores


Producto de un número real por un vector

Vectores linealmente dependientes



Vectores linealmente independientes

Producto escalar


Expresión analítica del módulo de un vector

Expresión analítica del ángulo de dos vectores

Vectores ortogonales

Proyección

Cosenos directores




Producto vectorial


Área del paralelogramo


Área de un triángulo


Producto mixto


Volumen del paralelepípedo

Volumen de un tetraedro

Puntos
Coordenadas del punto medio de un segmento

Coordenadas del baricentro de un triángulo

Puntos alineados
Tres o más puntos están alineados si están en una misma recta, y por tanto el rango de los vectores determinados por ellos es 1.
Puntos coplanarios
Dos o más vectores son coplanarios si son linealmente dependientes, y por tanto sus componentes son proporcionales y su rango es 2.
Dos o más puntos son coplanarios, si los vectores determinados por ellos también son coplanarios.
Ecuación vectorial de la recta
Sea P(x1, y1) es un punto de la recta r y  su vector director, el vector tiene igual dirección que
su vector director, el vector tiene igual dirección que  , luego es igual a multiplicado por un escalar:
, luego es igual a multiplicado por un escalar:
 su vector director, el vector tiene igual dirección que
su vector director, el vector tiene igual dirección que  , luego es igual a multiplicado por un escalar:
, luego es igual a multiplicado por un escalar:

Ecuaciones paramétricas de la recta
Operando en la ecuación vectorial de la recta llegamos a la igualdad:
Esta igualdad se verifica si:

Ecuaciones continuas de la recta
Despejando e igualando λ en las ecuaciones paramétricas se tiene:

Ecuaciones implícitas de la recta
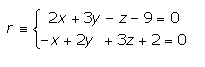
Una recta puede venir determinada por la intersección de los planos
.


Si en las ecuaciones continuas de la recta quitamos denominadores y pasamos todo al primer miembro, obtenemos también las ecuaciones implícitas.
Ejemplos
1.- Hallar las ecuaciones paramétricas, en forma continua e implícitas de la recta que pasa por el punto A = (1, 2, 1) y cuyo vector director es





2.-Hallar las ecuaciones paramétricas, en forma continua e implícita de la recta que pasa por los puntos A(1, 0, 1) y B(0, 1, 1).




Distancia de un punto a una recta
En Geometría euclidiana, la distancia de un punto a una recta es la distancia más corta entre ese punto y un punto de una línea o recta.

Sean A un punto y D una recta.
Se define la distancia entre A y D como la distancia mínima entre A y un punto M de D.
Se define la distancia entre A y D como la distancia mínima entre A y un punto M de D.
-
-
d(A,D)=minM∈D||A−M||
-
- Para una recta D definida por su ecuación reducida
y=a⋅x+b y siendo A un punto de la formaA=(xA,yA)
d(A,D)=|a⋅xA−yA+b|a2+1−−−−−√
Obsérvese que D={(x,y)|y=a⋅x+b}
La distancia mínima se ubica en la proyección ortogonal del punto M sobre D, es decir el punto M' de la recta D tal que (MM') sea perpendicular a ella. En efecto, si se toma otro punto cualquiera B de D, entonces en el triángulo rectángulo MM'B, la hipotenusa MB es más larga que el cateto MM'. Geométricamente, se construye el punto proyectado M' deslizando una escuadra sobre una regla que sigue la recta D hasta encontrar el punto M; luego se mide la longitud MM'.

Para calcular esta distancia, es aconsejable utilizar un sistema de coordenadas ortogonales - (O,i⃗ ,j⃗ ) en la figura. La recta y el punto cuya distancia se quiere medir son definidos por su ecuación cartesiana y sus coordenadas respectivamente: D:a⋅x+b⋅y+c=0 ; y M=(xy)
Si en la ecuación de la recta D variamos sólo el valor del parámetro "c" obtendremos una familia de rectas paralelas. De manera que para determinar un vector perpendicular podemos tomar c = 0. Así, los vectores sobre la recta tendrán la forma(−by/ay)=y(−b/a1) , que puede simplificarse a (−ba)
Si en la ecuación de la recta D variamos sólo el valor del parámetro "c" obtendremos una familia de rectas paralelas. De manera que para determinar un vector perpendicular podemos tomar c = 0. Así, los vectores sobre la recta tendrán la forma
Busquemos un vector normal a v⃗ (es decir, perpendicular a la recta), que deberá cumplir que el producto escalar u⃗ ⋅v⃗ =0 , y resulta ser u⃗ =(ab) (de ahí el interés de la ecuación cartesiana) y al dividirlo por su norma se obtiene el vector normado w⃗ =⎛⎝⎜aa2+b2√ba2+b2√⎞⎠⎟ que define una medida algebraica sobre la recta (M'M): M′M¯=M′M→⋅w⃗
La distancia MM' es el valor absoluto de la medida algebraica:
M′M=|M′M¯|=|M′M→⋅w⃗ |=|(x−x′y−y′)⋅⎛⎝⎜aa2+b2√ba2+b2√⎞⎠⎟|=|a(x−x′)+b(y−y′)|a2+b2√
Como M' pertenece a D, sus coordenadas verifican a·x' + b·y' = -c luego lo anterior se simplifica así:M′M=|ax−ax′+by−by′|a2+b2√=|ax+by−ax′−by′|a2+b2√=|ax+by+c|a2+b2√
La distancia MM' es el valor absoluto de la medida algebraica:
Como M' pertenece a D, sus coordenadas verifican a·x' + b·y' = -c luego lo anterior se simplifica así:
En conclusión: La distancia entre M y (D) es:
Esta fórmula es muy fácil de recordar: Se divide la expresión de la recta por la norma del vector y se pone el valor absoluto porque una distancia es siempre positiva.
- En el caso que la recta sea dada por el ángulo (θ) que hace con el eje de las abscisas y su ordenada al origen (b), la fórmula se simplifica:
- D: y = (tan θ) ·x + b se pone en forma cartesiana: (sin θ)·x - (cos θ)·y + b·cos θ = 0, luego, sabiendo que el vector
u⃗ (sen θcosθ) es unitario: d(M,D)=|(sen θ)⋅x−(cosθ)⋅y+b⋅cosθ|
- Ejemplo: la primera diagonal del sistema de referencia corresponde a un ángulo
θ=π4 y b = 0. Comocosπ4=sen π4=2√2 , se obtiene:d(M,D)=2√2⋅|x−y|
- En el caso de una recta definida por su ecuación reducida y = a·x + b; la ecuación cartesiana es a·x - y + b = 0 y la distancia a ella es:
- Ejemplo: Tomando a = 1 y b = 0, se obtiene de nuevo el resultado del ejemplo anterior.
Se calcula de la misma manera la distancia de un punto y un plano en el espacio tridimensional: Si la ecuación del plano es D:a⋅x+b⋅y+c⋅z+d=0 ; y el punto es M=⎛⎝x0y0z0⎞⎠ , entonces:
Lo anterior se generaliza a los espacios de dimensión finita n, y la distancia entre un punto y un hiperplano (subespacio de dimensión n-1), añadiendo cuantas variables hagan falta.
Ángulo entre dos rectas
El ángulo entre dos rectas  y
y  del espacio es el menor
del espacio es el menor
angulo entre las rectas que se obtienen al proyectar y
en un mismo plano paralelo a ambas rectas. Las rectas se
proyectan en un mismo plano porque, en general, no tienen
porque encontrarse en un mismo plano ( no tienen porque
ser coplanarias ).
y del espacio es el menor angulo entre las rectas que se obtienen al proyectar
y en un mismo plano paralelo a ambas rectas. Las rectas se
proyectan en un mismo plano porque, en general, no tienen
porque encontrarse en un mismo plano ( no tienen porque
ser coplanarias ).
Dos rectas en el plano forman dos ángulos, uno menor,
llamemos los, por ejemplo,  , y otro mayor ( o igual ), que
, y otro mayor ( o igual ), que
, y otro mayor ( o igual ), que
seria el suplementario de , .




El ángulo entre dos rectas y cuyos vectores directores
son, respectivamente, y
y  , se puede calcular con la
, se puede calcular con la
siguiente fórmula:
y cuyos vectores directores son, respectivamente,
y , se puede calcular con la siguiente fórmula:
 = \frac{\left| \, \mathbf{u} \cdot \mathbf{v} \, \right|}{\left| \, \mathbf{u} \, \right| \cdot \left| \, \mathbf{v} \, \right|}}")
Calculando el arco coseno del resultado obtenido aplicando
la fórmula anterior se obtiene el ángulo que forman las retas
y .Ejemplo
Calculemos el ángulo entre las rectas de ecuaciones

y
 = \left( \, 3, \, 2, \, -5 \, \right) + t
\cdot \left( \, 1, \, -1, \, 2 \, \right)")
La recta viene dada como la intersección de dos planos ( el
plano de ecuación
de ecuación  y el plano
y el plano  de ecuación
de ecuación  ).
).
viene dada como la intersección de dos planos ( el plano
de ecuación y el plano de ecuación ).
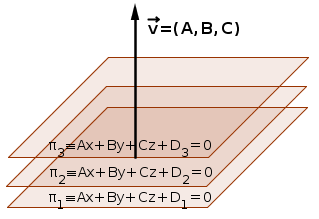
Un vector director de la recta es el vector que multiplica al
parámetro de la recta es el vector que multiplica al  en su ecuación, es decir:
en su ecuación, es decir:")
Podemos obtener un vector director de la recta
multiplicando vectorialmente un vector perpendicular al
plano por un vector perpendicular al plano
por un vector perpendicular al plano  .
.
de la recta multiplicando vectorialmente un vector perpendicular al
plano
por un vector perpendicular al plano .
Un vector  perpendicular al plano lo podemos obtener de
perpendicular al plano lo podemos obtener de
los coeficientes de x, y, z en la ecuación del plano:
perpendicular al plano lo podemos obtener de los coeficientes de x, y, z en la ecuación del plano
:")
De la misma forma obtenemos un vector  perpendicular al
perpendicular al
plano:
perpendicular al plano
:")
El producto vectorial de ambos vectores, y es
y es")
El ángulo que forman las rectas y es, por tanto
y es, por tanto \cdot \left( \, 3, \, 6, \, 3 \, \right) \,
\right|}{\sqrt{1^2 + \left( \, -1 \, \right)^2 + 2^2} \cdot \sqrt{3^2 + 6^2 +
3^2}} = \mathrm{arc} \cos \frac{1}{6}
</pre>
<p>")
Así como una recta esta determinada por dos puntos distintos, un plano está determinado por tres puntos no colineales.
Una manera muy conveniente de obtener una ecuación del plano
Esta ecuación es una ecuación normal de 

Figura 30.
Si ponemos  y desarrollamos la ecuación anterior, obtenemos una ecuación cartesiana de
y desarrollamos la ecuación anterior, obtenemos una ecuación cartesiana de
Finalmente, podemos observar que si
Esta es una ecuación vectorial de .

Figura 31.

Figura 32.
Ecuación vectorial




































 el medio perímetro.
el medio perímetro.
 de una esfera de radio de radio R el plano tangente viene dao por:
de una esfera de radio de radio R el plano tangente viene dao por:



 puntos de corte a, b, c):
puntos de corte a, b, c): 














{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
0 comentarios:
Publicar un comentario